
Wie ich in meinem letzten Beitrag erwähnte, möchte ich gern den Roboter mit dem Raspberry Pi steuern. Da man mit einem Pi Motoren nicht direkt ansteuern kann, benutze ich das L298N Chip als Motor Driver. Nach folgendem Video habe ich alles zusammengesteckt bzw. alle fehlenden Kabel noch angelötet. Im Video wird nur ein Motor angeschlossen, aber die restlichen 4 GPIO Pins habe ich genutzt, um den zweiten Motor zu steuern.
Ich habe das im Video verwendet Testskript für den zweiten Motor erweitert, um die Motoren zu testen.
import RPi.GPIO as gpio import time gpio.setmode(gpio.BOARD) gpio.setup(7, gpio.OUT) gpio.setup(11, gpio.OUT) gpio.setup(13, gpio.OUT) gpio.setup(15, gpio.OUT) gpio.setup(12, gpio.OUT) gpio.setup(16, gpio.OUT) gpio.setup(18, gpio.OUT) gpio.setup(22, gpio.OUT) gpio.output(7, True) gpio.output(11, True) #Enable B für den 2. Motor gpio.output(12, True) gpio.output(22, True) #Motor 1 gpio.output(13, True) gpio.output(15, False) #Motor 2 gpio.output(16, True) gpio.output(18, False) time.sleep(2) gpio.output(13, False) gpio.output(15, True) gpio.output(16, False) gpio.output(18, True) time.sleep(2) gpio.output(13, False) gpio.output(15, False) gpio.output(16, False) gpio.output(18, False) gpio.cleanup()
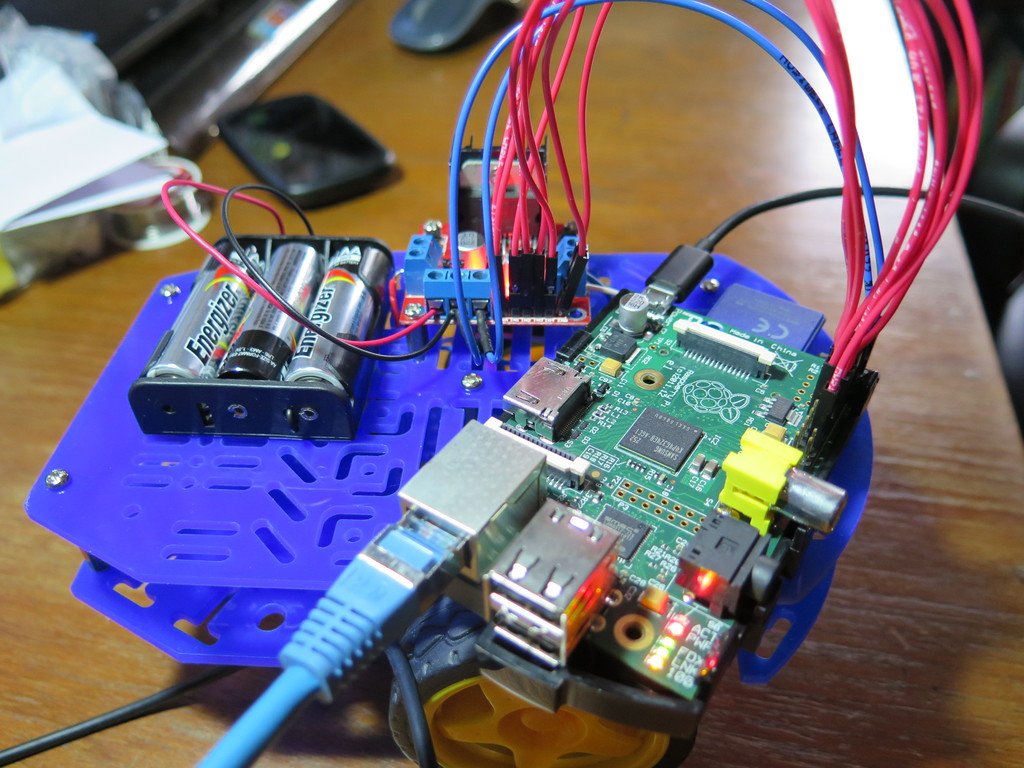
Mit diesem kleinen Testskript kann man den Roboter vor und zurück fahren lassen. Das mitgelieferte Batteriefach hat Platz für 3 AA Batterien. Diese liefern insgesamt zu wenig Spannung für die Motoren, sodass das Fahrzeug zwar fährt, aber nicht genügend Drehmoment („Kraft“) hat. Ich werde ein neues besorgen, welches Platz für vier oder mehr AA Batterien hat.
Und hier noch ein Bild:
Neue Publizierung: Stephan Tetzel (zefanja): Build a Robot #1 – Motoren ansteuern http://t.co/a8PqeDJcsJ #planetdfde
[…] Build a Robot #1 […]